Autopilot controls pass off some of the workload of controlling the vehicle to Workspace. Without any auto-settings or “autos” turned on, you will be directly controlling the vehicle with the joystick/controller/computer. Piloting the vehicle becomes much easier if you are using the autos.
Not all vehicles have the required sensors to use all of the auto-settings described in this post. Check with your manufacturer if you are unsure. Note: Your version of Workspace might look or behave differently than described depending upon vehicle and version.
On vs. Off
Let’s start with the basics. On vs. Off. Below are the icons that represent Auto-depth.
 |
 |
| When the icon is blue, the auto-setting is turned off. |
Clicking the icon, turns it green and activates the auto-setting. In this example, auto-depth is now active. |
Six degrees of movement
Here’s a look at how a ROV moves in 3D space. The picture below shows three dimensional space with the x-, y-, and z-axes.
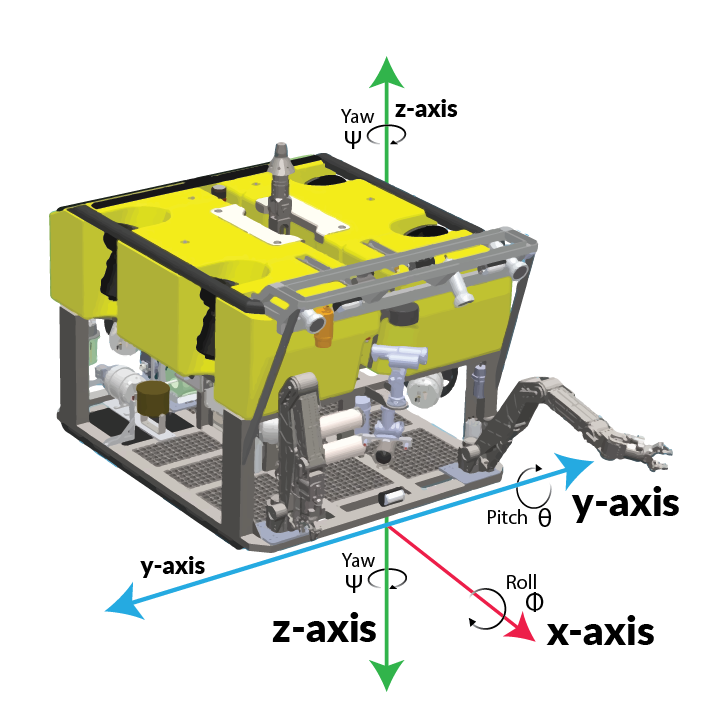 |
- Moving up and down (elevating/heaving) is along the z-axis. Auto-depth and auto-altitude set this position.
- Moving left and right (strafing/swaying) is along the y-axis.
- Moving forward and backward (walking/surging) is along the x-axis.
- Turning left and right (yawing) is rotating on the z-axis. Auto-heading sets this position.
- Tilting forward and backward (pitching) is rotating on the y-axis. Auto-pitch sets this position.
- Pivoting side to side (rolling) is rotating on the x-axis. Auto-roll sets this position.
|
Auto-heading
|
When auto-heading is set, the vehicle will hold its orientation and will hold at that heading. This is a setting that you will likely always want on, as the vehicle will try to maintain its heading despite any current that might push the vehicle around.
|
Auto-pitch
|
Pitch is the vehicle tilting forward or backward in relation to itself, like a rocking horse. When auto-pitch is enabled, the vehicle will maintain its set pitch measured in degrees – positive for nose up or negative for nose down.
|
Auto-roll
|
Roll is the vehicle tilting left or right, like a clock pendulum. When auto-roll is enabled, the vehicle will maintain its set roll measured in degrees.
|
Auto-depth and Auto-altitude
|
Auto-depth and auto-altitude are handled together as they are similar, each auto-setting sets its position along the z-axis. Auto-depth measures the vehicle’s distance from the surface (usually with a pressure sensor). Auto-altitude measures the vehicle’s distance from the ocean floor, lake bottom, or river bed. Turning one on will cancel the other.
|
Setting these auto controls can help the pilot stabilize the vehicle, but these settings do not allow a vehicle to hold a position or location.